Branch
Source: GridKit/Model/PowerFlow/Branch/README.md
Branch Model
Transmission lines and different types of transformers (traditional, Load Tap-Changing transformers (LTC) and Phase Angle Regulators (PARs)) can be modeled with a common branch model.
Transmission Line Model
The most common circuit that is used to represent the transmission line model is \(\pi\) circuit as shown in Figure 1. The nominal flow direction is from sending bus s to receiving bus r.
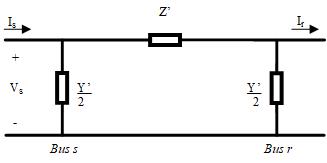
Figure 1: Transmission line \(\pi\) equivalent circuit
Here
and
where \(R\) is line series resistance, \(X\) is line series reactance, \(B\) is line shunt charging, and \(G\) is line shunt conductance. As can be seen from Figure 1 total \(B\) and \(G\) are separated between two buses. The current leaving the sending bus can be obtained from Kirchhoff’s current law as
where \(V_s\) and \(V_r\) are voltages on sending and receiving bus, respectively, and
Similarly, current leaving receiving bus is given as
These equations can be written in a compact form as:
where:
Branch contributions to residuals for sending and receiving bus
Complex power leaving sending and receiving bus is computed as
After some algebra, one obtains expressions for active and reactive power that the branch takes from adjacent buses:
These quantities are treated as loads and are substracted from \(P\) and \(Q\) residuals computed on the respective buses.
Branch Model
Note: Transformer model not yet implemented
The branch model can be created by adding the ideal transformer in series with the \(\pi\) circuit as shown in Figure 2 where \(\tau\) is a tap ratio magnitude and \(\theta_{shift}\)is the phase shift angle.
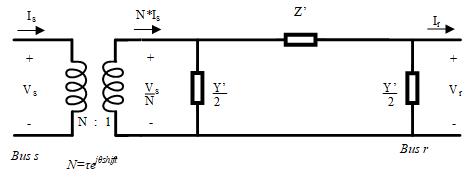
Figure 2: Branch equivalent circuit
The branch admitance matrix is then:
Branch contribution to residuals for sending and receiving bus
The power flow contribution for the transformer model are obtained in a similar manner as for the \(\pi\)-model.