SEXS-PTI
Source: GridKit/Model/PhasorDynamics/Exciter/SEXS-PTI/README.md
Simplified Excitation System Model (SEXS-PTI)
Block Diagram
Simplified excitation system model.
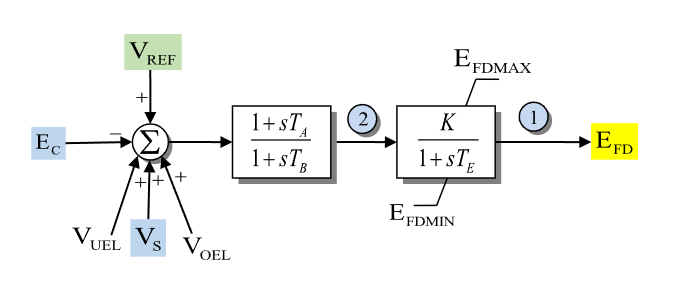
Figure 1: Exciter SEXS-PTI model. Figure courtesy of PowerWorld
Model Parameters
Symbol |
Units |
Description |
Typical Value |
Note |
|---|---|---|---|---|
\(T_A\) |
[sec] |
Numerator time constant of lag-lead block |
||
\(T_B\) |
[sec] |
Denominator time constant of lag-lead block |
||
\(T_E\) |
[sec] |
Exciter field time constant |
||
\(K\) |
[p.u.] |
Voltage regulator gain |
||
\(E_{fd}^{\max}\) |
[p.u.] |
Maximum excitation output |
||
\(E_{fd}^{\min}\) |
[p.u.] |
Minimum excitation output |
PowerWorld/PSS/E SEXS_PTI data often gives \(T_A/T_B\) as a ratio. GridKit stores \(T_A\) and \(T_B\) separately, so convert ratio-format data with \(T_A = (T_A/T_B)T_B\) before passing parameters to the model.
Model Variables
Internal Variables
Differential
Symbol |
Units |
Description |
Note |
|---|---|---|---|
\(V_R\) |
[p.u.] |
Lag-lead block state |
|
\(E_{fd}\) |
[p.u.] |
Exciter field voltage output |
Algebraic
Symbol |
Units |
Description |
Note |
|---|---|---|---|
\(V_{tr}\) |
[p.u.] |
Terminal voltage error signal |
External Variables
Differential
None.
Algebraic
Symbol |
Units |
Description |
Note |
|---|---|---|---|
\(E_C\) |
[p.u.] |
Compensated machine terminal voltage magnitude |
Computed from bus voltage |
\(V_{ref}\) |
[p.u.] |
Reference voltage |
Set during initialization |
\(V_S\) |
[p.u.] |
Stabilizer output |
Optional, defaults to zero |
\(V_{OEL}\) |
[p.u.] |
Over-excitation limiter signal |
Constant zero until modeled |
\(V_{UEL}\) |
[p.u.] |
Under-excitation limiter signal |
Constant zero until modeled |
Model Equations
Differential Equations
The SEXS-PTI differential equations, as derived from the model diagram. Define the pre-limit derivative of \(E_{fd}\)
so that \(\dot E_{fd}\) can be written in piecewise form compactly.
In simulation the piecewise form above is replaced with a smooth approximation where \(\phi\) is GridKit’s smooth anti-windup indicator. See CommonMath: Anti-Windup Indicator for its definition, behavior, and design rationale.
Algebraic Equations
Initialization
The generator initializes the EFD signal first. SEXS-PTI then reads that value as \(E_{fd,0}\) and assumes steady state with \(V_S=V_{OEL}=V_{UEL}=0\):
All derivatives initialize to zero.