IEEET1
Source: GridKit/Model/PhasorDynamics/Exciter/IEEET1/README.md
IEEE Type 1 Excitation System Model (IEEET1)
Block Diagram
Standard model of the IEEET1 Exciter.
Notes:
\(E_C\) should be an external signal from the generator or machine, not computed through an exciter-owned
Busreference.The current implementation uses its
Busreference as a proxy for \(E_C\).This direct coupling affects numerical conditioning; production models typically use a decoupling reactance for the exciter-current path that forms \(E_C\).
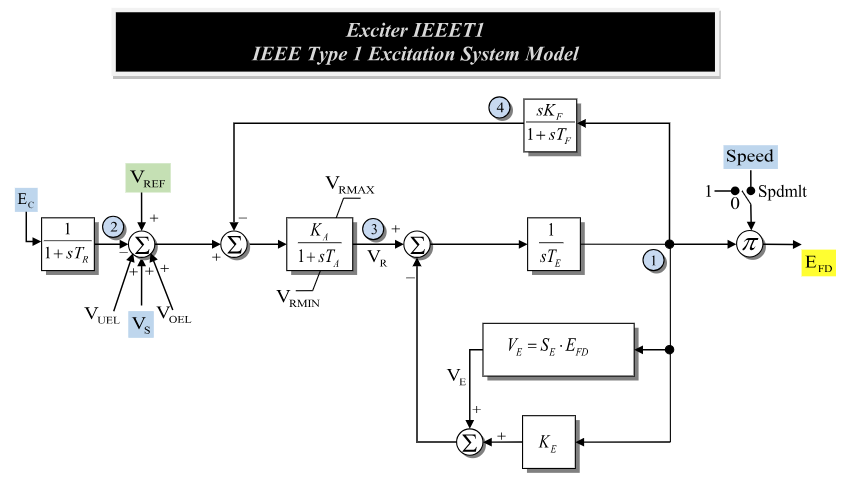
Figure 1: Exciter IEEET1 model. Figure courtesy of PowerWorld
Model Parameters
Symbol |
Units |
Description |
Typical Value |
Note |
|---|---|---|---|---|
\(T_R\) |
[sec] |
Time constant for voltage sensing |
0 |
|
\(K_A\) |
[p.u.] |
Coefficient for voltage regulation |
50 |
|
\(T_A\) |
[sec] |
Time constant for voltage regulation |
0.04 |
|
\(K_E\) |
[p.u.] |
Coefficient for excitation system |
-0.06 |
|
\(T_E\) |
[sec] |
Time constant for excitation system |
0.6 |
|
\(K_F\) |
[p.u.] |
Coefficient for feedback |
0.09 |
|
\(T_F\) |
[sec] |
Time constant for feedback |
1.46 |
|
\(V_R^{\min}\) |
[p.u.] |
Lower limit to voltage regulation |
-1 |
|
\(V_R^{\max}\) |
[p.u.] |
Upper limit to voltage regulation |
1 |
|
\(E_1\) |
[p.u.] |
Saturation Parameter |
2.8 |
|
\(E_2\) |
[p.u.] |
Saturation Parameter |
3.73 |
|
\(S_1\) |
[p.u.] |
Saturation Parameter |
0.04 |
|
\(S_2\) |
[p.u.] |
Saturation Parameter |
0.33 |
|
\(I_\text{spdlm}\) |
[binary] |
Speed limit flag indicator |
0 |
Model Derived Parameters
The relationship of the derived parameters is defined by the following quadratic model. The parameters are chosen so that the quadratic model represents the expected saturation near the operating region.
Generally, this system has two solutions. The non-extraneous solution is as follows.
Model Variables
Internal Variables
Differential
Symbol |
Units |
Description |
Note |
|---|---|---|---|
\(V_{ts}\) |
[p.u.] |
Sensed terminal voltage |
|
\(V_R\) |
[p.u.] |
Voltage regulator |
|
\(E_{fd}'\) |
[p.u.] |
Field-current pre-speed multiplier |
|
\(V_{fx}\) |
[p.u.] |
Exciter feedback internal state |
Algebraic
Symbol |
Units |
Description |
Note |
|---|---|---|---|
\(V_{tr}\) |
[p.u.] |
Terminal Voltage Error |
|
\(V_f\) |
[p.u.] |
Feedback Voltage |
|
\(V_E\) |
[p.u.] |
Excitation control voltage |
|
\(E_{fd}\) |
[p.u.] |
Field winding voltage |
|
\(k_\text{sat}\) |
[p.u.] |
Saturation variable |
External Variables
Differential
Symbol |
Units |
Description |
Note |
|---|---|---|---|
\(\omega\) |
[p.u.] |
Machine Speed Deviation |
Read from a Machine Model |
Algebraic
Symbol |
Units |
Description |
Note |
|---|---|---|---|
\(E_C\) |
[p.u.] |
Compensated machine terminal voltage magnitude |
|
\(V_\text{ref}\) |
[p.u.] |
Reference terminal voltage |
|
\(V_{UEL}\) |
[p.u.] |
Input from under excitation limiter |
|
\(V_{OEL}\) |
[p.u.] |
Input from over excitation limiter |
|
\(V_S\) |
[p.u.] |
Input from stabilizer controller |
Model Equations
Differential Equations
The IEEET1 differential equations, as derived from the model diagram. Define the pre-limit derivative of \(V_R\)
so that \(\dot V_R\) is the anti-windup limited derivative.
CommonMath defines the Anti-Windup target and smooth approximation.
Algebraic Equations
The algebraic equations of the exciter.
Smooth Piecewise Approximation (Algebraic)
For the algebraic piecewise functions (non-flags), this implementation is straightforward when the approximation above is used. Here \(q\) is GridKit’s Quadratic Ramp.
Initialization
The machine initializes \(E_{fd}\) first. IEEET1 reads that value as \(E_{fd,0}\), along with any attached \(\omega\) and \(V_S\), and solves the steady-state algebraic chain so all residuals vanish with \(\dot y = 0\). There is no compensation impedance, so \(E_C\) is taken as the terminal voltage magnitude. Saturation and the speed-limit flag are included directly; \(V_\text{ref}\) is set to close the \(V_{tr}\) equation with the current auxiliary inputs.
All internal derivatives initialize to zero.
Model Outputs
The field voltage, \(E_{fd}\), is an internal model variable.
The magnetic saturation coefficient \(k_\text{sat}\) is calculated from \(E_{fd}\) using the smooth piecewise version above.