ESAC6A
Source: GridKit/Model/PhasorDynamics/Exciter/ESAC6A/README.md
IEEE Type AC6A Excitation System Model (ESAC6A)
ESAC6A is an IEEE Type AC excitation system with sensed terminal-voltage feedback, cascaded regulator lead-lag blocks, voltage-regulator limits, an exciter alternator state, field-current feedback limiting, rectifier loading, saturation, and optional speed multiplier.
Notes:
Internal voltage and current signals are on model base unless otherwise stated.
The rectifier loading block \(F_{\mathrm{ex}}=f(I_N)\) is the source AC-exciter loading curve from Fig. 1; it is not a CommonMath helper.
The source diagram labels the optional multiplier input as
Speed; GridKit uses machine speed deviation, so the enabled multiplier is \(1+\omega\).
Block Diagram
Standard model of the ESAC6A Exciter.
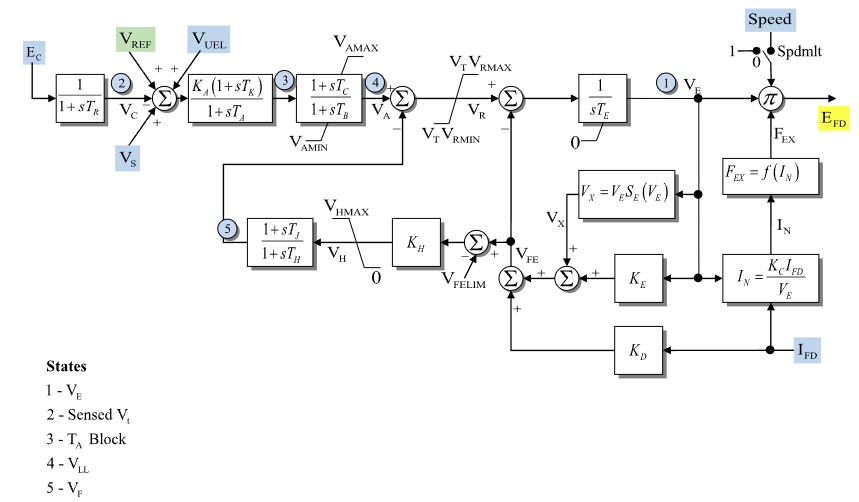
Figure 1: Exciter ESAC6A model. Figure courtesy of PowerWorld
Model Parameters
Symbol |
Units |
JSON |
Description |
Typical Value |
Note |
|---|---|---|---|---|---|
\(T_R\) |
[sec] |
|
Transducer time constant |
0.0 |
Block name: |
\(K_A\) |
[p.u.] |
|
Voltage-regulator gain |
40.0 |
Block name: |
\(T_A\) |
[sec] |
|
Regulator denominator time constant |
0.1 |
Block name: |
\(T_K\) |
[sec] |
|
Regulator numerator time constant |
0.0 |
Block name: |
\(T_B\) |
[sec] |
|
Lag time constant for second lead-lag block |
0.0 |
Block name: |
\(T_C\) |
[sec] |
|
Lead time constant for second lead-lag block |
0.0 |
Block name: |
\(V_A^{\max}\) |
[p.u.] |
|
Maximum first regulator block output |
1.0 |
Block name: |
\(V_A^{\min}\) |
[p.u.] |
|
Minimum first regulator block output |
-1.0 |
Block name: |
\(V_R^{\max}\) |
[p.u.] |
|
Maximum voltage-regulator output |
1.0 |
Block name: |
\(V_R^{\min}\) |
[p.u.] |
|
Minimum voltage-regulator output |
-1.0 |
Block name: |
\(T_E\) |
[sec] |
|
Exciter alternator time constant |
0.5 |
Block name: |
\(V_{\mathrm{fe}}^{\mathrm{lim}}\) |
[p.u.] |
|
Feedback-limiter summing-junction reference |
0.0 |
Source label: |
\(K_H\) |
[p.u.] |
|
Feedback-limiter gain |
1.0 |
Block name: |
\(V_H^{\max}\) |
[p.u.] |
|
Maximum feedback-limiter lead-lag output |
1.0 |
Block name: |
\(T_H\) |
[sec] |
|
Feedback-limiter denominator time constant |
0.0 |
Block name: |
\(T_J\) |
[sec] |
|
Feedback-limiter numerator time constant |
0.0 |
Block name: |
\(K_C\) |
[p.u.] |
|
Rectifier loading current coefficient |
0.0 |
Block name: |
\(K_D\) |
[p.u.] |
|
Demagnetizing factor feedback gain |
0.0 |
Block name: |
\(K_E\) |
[p.u.] |
|
Exciter field-resistance line-slope margin |
0.1 |
Block name: |
\(E_1\) |
[p.u.] |
|
First saturation voltage point |
2.8 |
Block name: |
\(S_E(E_1)\) |
[p.u.] |
|
Saturation value at \(E_1\) |
0.08 |
Block name: |
\(E_2\) |
[p.u.] |
|
Second saturation voltage point |
3.7 |
Block name: |
\(S_E(E_2)\) |
[p.u.] |
|
Saturation value at \(E_2\) |
0.33 |
Block name: |
\(s_{\mathrm{spd}}\) |
[binary] |
|
Speed multiplier flag |
0 |
Block name: |
Parameter Validation
Invalid ESAC6A parameter sets are rejected by the following checks.
The saturation points are either disabled together or define a valid positive two-point quadratic fit.
Model Derived Parameters
The saturation curve is fitted from the two supplied saturation points. If both saturation factors are zero, use \(S_A=0\) and \(S_B=0\). Otherwise:
Model Variables
Internal Variables
Differential
Symbol |
Units |
Description |
Note |
|---|---|---|---|
\(V_E\) |
[p.u.] |
Exciter alternator voltage state before output multipliers |
State 1 in Fig. 1; source label: |
\(V_C\) |
[p.u.] |
Sensed compensated voltage |
State 2 in Fig. 1; source label: |
\(x_A\) |
[p.u.] |
First regulator lead-lag denominator state |
State 3 in Fig. 1; source label: |
\(x_{\mathrm{ll}}\) |
[p.u.] |
Second lead-lag denominator state |
State 4 in Fig. 1; source label: |
\(V_F\) |
[p.u.] |
Stabilizing feedback signal |
State 5 in Fig. 1; source label: |
Algebraic
Symbol |
Units |
Description |
Note |
|---|---|---|---|
\(e_V\) |
[p.u.] |
Voltage-regulator input error before first lead-lag |
Summing junction after sensed voltage |
\(V_A\) |
[p.u.] |
Limited first regulator lead-lag output |
Limited by \(V_A^{\min}\) and \(V_A^{\max}\) |
\(V_{\mathrm{ll}}\) |
[p.u.] |
Second lead-lag output |
Input to \(V_R\) summing junction |
\(V_H\) |
[p.u.] |
Feedback-limiter lead-lag output before \(K_H\) |
Limited by 0 and \(V_H^{\max}\) |
\(V_H^{\mathrm{pre}}\) |
[p.u.] |
Feedback-limiter lead-lag output before limits |
Bypasses to \(V_F\) when \(T_H=T_J=0\) |
\(V_R\) |
[p.u.] |
Voltage-regulator output |
Limited by \(V_R^{\min}\) and \(V_R^{\max}\) |
\(S_E\) |
[p.u.] |
Saturation coefficient evaluated at \(V_E\) |
Uses derived saturation curve |
\(I_N\) |
[p.u.] |
Normalized exciter loading current |
Source label: |
\(F_{\mathrm{ex}}\) |
[p.u.] |
Rectifier loading factor |
Source label: |
\(V_{\mathrm{fe}}\) |
[p.u.] |
Exciter feedback signal |
Sum of saturation/resistance, \(K_D I_{\mathrm{fd}}\), and feedback-limiter paths |
\(E_{\mathrm{fd}}\) |
[p.u.] |
Field-voltage output |
Output after rectifier loading and optional speed multiplier |
External Variables
Differential
None.
Algebraic
Symbol |
Units |
Description |
Note |
|---|---|---|---|
\(E_C\) |
[p.u.] |
Compensated terminal voltage magnitude |
Source label: |
\(V_{\mathrm{ref}}\) |
[p.u.] |
Voltage-control reference |
Source label: |
\(V_{\mathrm{uel}}\) |
[p.u.] |
Under-excitation limiter input |
Source label: |
\(V_S\) |
[p.u.] |
Stabilizer input signal |
Source label: |
\(I_{\mathrm{fd}}\) |
[p.u.] |
Machine field current |
Source label: |
\(\omega\) |
[p.u.] |
Machine speed deviation |
Source label: |
Model Equations
Differential Equations
Algebraic Equations
CommonMath defines helper targets for clamp and the primitive quadratic ramp \(q\). The rectifier loading function \(f(I_N)\) is the source curve shown in Fig. 1. When \(T_B=T_C=0\), the second lead-lag block is bypassed. When \(T_H=T_J=0\), the feedback-limiter lead-lag block is bypassed before the 0-to-\(V_H^{\max}\) clamp.
Initialization
The machine initializes \(E_{\mathrm{fd}}\) and \(I_{\mathrm{fd}}\) first. For a standard unsaturated start, ESAC6A reads those values and sets all internal derivatives to zero. First solve the coupled rectifier-loading equations:
Then evaluate:
This standard start requires \(1+s_{\mathrm{spd}}\omega_0\ne 0\), \(V_{E,0}\ne 0\), inactive \(V_A\), \(V_R\), and \(V_H\) limits, and nonsingular regulator gains/time constants. Starts that bind those limits are outside these closed-form equations.
Model Outputs
Output |
Units |
Description |
Note |
|---|---|---|---|
|
[p.u.] |
Field-voltage output |
\(E_{\mathrm{fd}}\) |
|
[p.u.] |
Exciter alternator voltage state |
\(V_E\) |
|
[p.u.] |
Sensed compensated voltage |
\(V_C\) |
|
[p.u.] |
First regulator output |
\(V_A\) |
|
[p.u.] |
Second lead-lag output |
\(V_{\mathrm{ll}}\) |
|
[p.u.] |
Feedback-limiter state |
\(V_F\) |
|
[p.u.] |
Feedback-limiter output |
\(V_H\) |
|
[p.u.] |
Voltage-regulator output |
\(V_R\) |
|
[p.u.] |
Normalized exciter loading current |
\(I_N\) |
|
[p.u.] |
Rectifier loading factor |
\(F_{\mathrm{ex}}\) |
|
[p.u.] |
Saturation coefficient |
\(S_E\) |